1、了解解垛的控制方法;
2、掌握PLC编程与操作方法。
1、制造物联实验平台一套;
2、安装西门子编程软件STEP7-MicroWIN 的计算机一台。
在系统开始运行前,将6个仓位都放上托盘。进行解垛时,首先判断哪些仓位有托盘,再根据优先级来判定应该去取哪个仓位的托盘。取托盘的命令由水平移动平台、垂直升降平台和机械手爪配合完成。机械手将托盘放置于传送带后返回原点,托盘由传送带通过转角机往下个单元传送。
堆垛解垛单元布局如图1-14-1和图1-14-2所示。
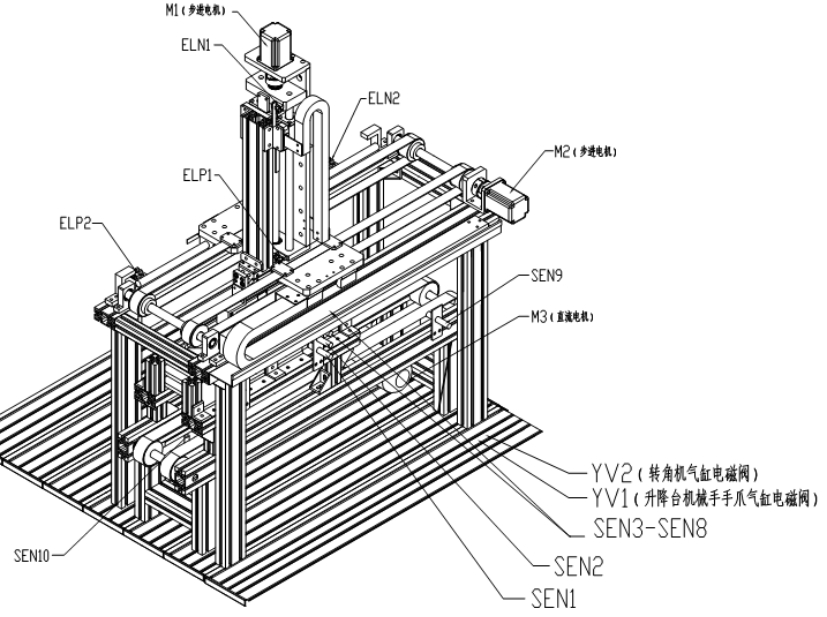
图1-14-1 解垛单元结构图
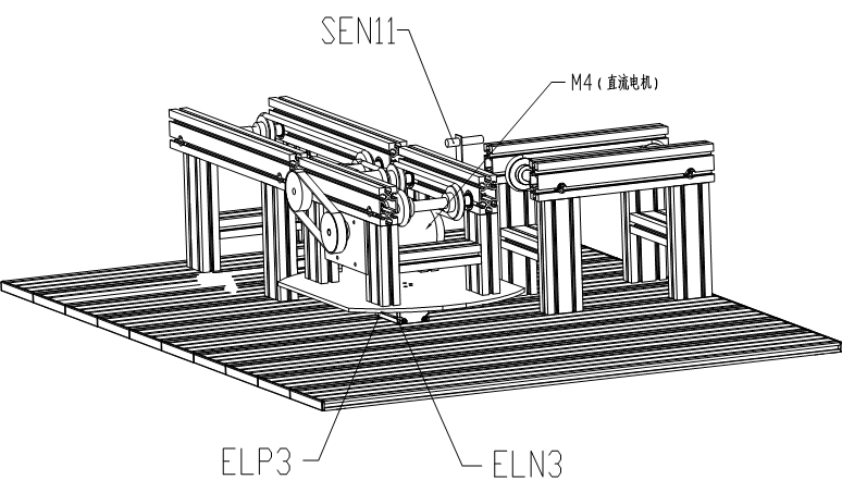
图1-14-2 转角机结构图
各部件名称和作用介绍如下:
YV1:机械手手爪气缸电磁阀,用于抓取托盘;
YV2:转角机旋转气缸电磁阀,用于控制转角机的旋转,旋转角度90°;
SEN1: 码垛仓库工位1,用于检测对应仓位有无工件;
SEN2: 码垛仓库工位2,用于检测对应仓位有无工件;
SEN3: 码垛仓库工位3,用于检测对应仓位有无工件;
SEN4: 码垛仓库工位4,用于检测对应仓位有无工件;
SEN5: 码垛仓库工位5,用于检测对应仓位有无工件;
SEN6: 码垛仓库工位6,用于检测对应仓位有无工件;
SEN7:码垛仓库工位7,用于检测对应仓位有无工件;
SEN8:码垛仓库工位8,用于检测对应仓位有无工件;
SEN9: 码垛输出工位检测开关,用于检测码垛机传送带输出端有无工件;
SEN10: 码垛输入工位检测开关,用于检测码垛机传送带输入端有无工件;
SEN11:转角机工件检测开关,用于检测转角机上有无工件;
ELN1: 升降台负限位,用于限制垂直升降平台电机运行行程;
ELP1: 升降台正限位,用于限制垂直升降平台电机运行行程;
ELN2: 一维移动平台负限位,用于限制水平移动平台电机运行行程;
ELP2: 一维移动平台正限位,用于限制水平移动平台电机运行行程;
ELN3: 转角机逆时针限位,用于标志转角气缸逆时针旋转到位;
ELP3: 转角机顺时针限位,用于标志转角气缸顺时针旋转到位。
本实验中用到的控制PLC部分输入输出点配置表如表1-14-1所示,请仔细阅读此表。
表1-14-1堆垛解垛单元控制系统PLC部分输入输出点配置表
输入点 | 信号 | 说 明 | 输入状态 |
ON | OFF |
I0.0 | START | 启动按钮 | 有效 | 无效 |
I0.1 | STOP | 停止按钮 | 有效 | 无效 |
I0.2 | RESET | 复位按钮 | 有效 | 无效 |
I0.3 | CEMG | 紧急停止按钮 | 有效 | 无效 |
I0.4 | SEN1 | 码垛仓库工位1 | 有效 | 无效 |
I0.5 | SEN2 | 码垛仓库工位2 | 有效 | 无效 |
I0.6 | SEN3 | 码垛仓库工位3 | 有效 | 无效 |
I0.7 | SEN4 | 码垛仓库工位4 | 有效 | 无效 |
I1.0 | SEN5 | 码垛仓库工位5 | 有效 | 无效 |
I1.1 | SEN6 | 码垛仓库工位6 | 有效 | 无效 |
I1.2 | SEN7 | 码垛仓库工位7 | 有效 | 无效 |
I1.3 | SEN8 | 码垛仓库工位8 | 有效 | 无效 |
I1.4 | SEN9 | 码垛输出工位检测开关 | 有效 | 无效 |
I1.5 | SEN10 | 码垛输入工位检测开关 | 有效 | 无效 |
I1.6 | SEN11 | 转角机工件检测信号 | 有效 | 无效 |
I1.7 | 1EL- | 升降台负限位 | 有效 | 无效 |
I2.0 | 1EL+ | 升降台正限位 | 有效 | 无效 |
I2.1 | 2EL- | 一维移动平台负限位 | 有效 | 无效 |
I2.2 | 2EL+ | 一维移动平台正限位 | 有效 | 无效 |
I2.3 | 3EL- | 转角机逆时针限位 | 有效 | 无效 |
I2.4 | 3EL+ | 转角机顺时针限位 | 有效 | 无效 |
I2.5 | M/A | 单/联机信号 | 单机 | 联机 |
I2.6 | ASTART | 解垛启动信号(备用按钮) | 有效 | 无效 |
I2.7 | | 报警清除 | 有效 | 无效 |
输出点 | 信号 | 说 明 | 输出状态 |
ON | OFF |
Q0.0 | 1CP | 升降台电机脉冲输出 | | |
Q0.1 | 2CP | 一维移动平台脉冲输出 | | |
Q0.2 | 1DIR | 升降台电机方向信号 | 下降 | 上升 |
Q0.3 | 2DIR | 一维移动平台方向信号 | 左移 | 右移 |
Q0.4 | START-HL | 启动指示灯 | 有效 | 无效 |
Q0.5 | STOP-HL | 停止指示灯 | 有效 | 无效 |
Q0.6 | RESET-HL | 复位指示灯 | 有效 | 无效 |
Q0.7 | ALM-HL | 报警指示灯 | 有效 | 无效 |
Q1.0 | YV1 | 升降台机械手手爪气缸电磁阀 | 夹紧 | 张开 |
Q1.1 | YV2 | 转角机旋转气缸电磁阀 | 顺时针 | 逆时针 |
Q1.2 | M3 | 传送带电机 | 启动 | 停止 |
Q1.3 | M4 | 转角机电机 | 启动 | 停止 |
Q1.4 | M4DIR | 转角机电机方向信号 | 正转 | 反转 |
以下是堆垛解垛单元触摸屏监控界面,如图1-14-5和图1-14-6所示,联机运行时通过触摸屏对系统运行状态进行监测,单机时通过触摸屏对系统进行手动控制。
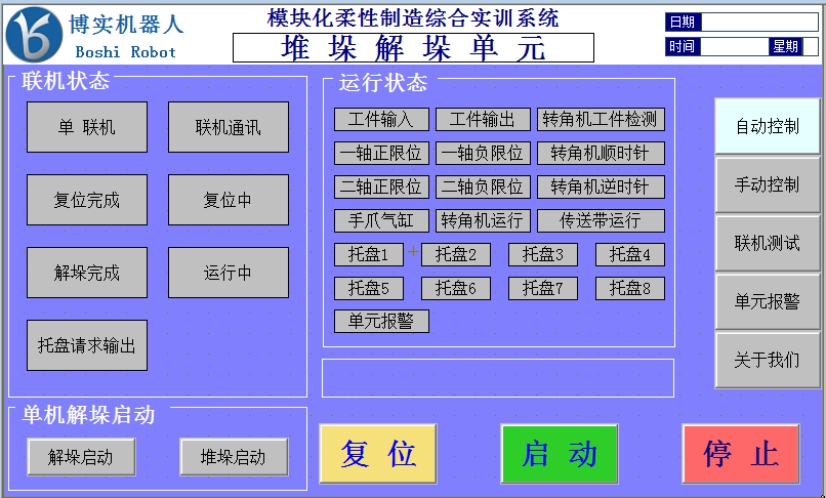
图1-14-5 堆垛解垛单元自动控制界面

图1-14-6 堆垛解垛单元手动控制界面
 堆垛解垛单元解垛实验-接线说明.pdf堆垛解垛单元解垛实验-实验步骤.pdf
堆垛解垛单元解垛实验-接线说明.pdf堆垛解垛单元解垛实验-实验步骤.pdf

