1、认识了解并联机器人的机构组成;
2、了解并联机器人示教与再现的原理;
3、掌握并联机器人示教和再现过程的操作方法。
1、制造物联实验平台一套。
并联机器人采用并联式结构,即机器人各连杆两端由虎克铰连接,如图1-4-1所示。六连杆上端虎克铰安装于丝杠导轨滑块上,通过滑块运动,带动六连杆运动,是活动平台产生各自由度运动。
机器人各连杆采用伺服电机驱动,并通过Windows环境下的软件编程和运动控制器实现对机器人的控制,使机器人运动平台能够在工作空间内任意位置精确定位。
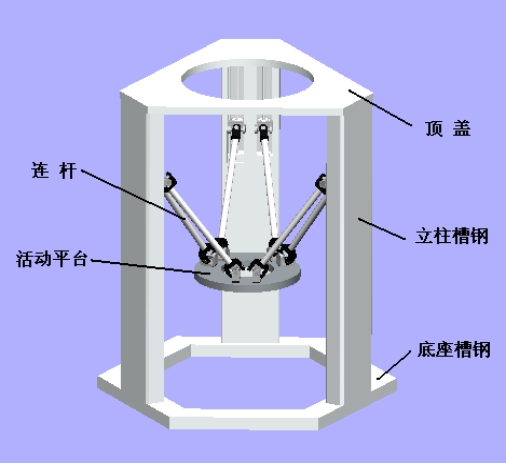
图1-4-1 并联机器人结构图
机器人的示教、再现是示教再现型机器人实现机器人作业的两个过程。在示教过程中,操作者通过示教盒或计算机屏幕上的软件示教界面操作机器人运动,计算机系统内安装的示教软件将机器人运动轨迹各段的起点和终点、运动类型、运动速度等信息自动地记录在计算机存储器中;在再现过程中,重放存储器中存储的各段轨迹的运动类型和运动速度,并通过插补算法计算出各段轨迹的起点和终点中间的各个位置点,作为电机伺服系统的指令,从而再现示教过的作业程序。示教、再现的原理如图1-4-2所示。

图1-4-2 示教再现原理图
1、仔细观察并联机器人外貌特征,思考并联机器人运动特点;
2、观察并联机器人的各个部件,对照原理图,说出各个部件的作用;
3、启动计算机,运行并联机器人软件“Rbt6pClnt.exe”如图1-4-3所示;

图1-4-3 并联机器人加工界面
4、点击主界面“复位”按钮,并联机器人进行回零运动,运动完成后,并联机器人处于零点位置;
5、点击主界面“设置”按钮,可以将示教文件(通过示教软件对各个关节位姿记录得来的,扩展名为.6sj)加载到程序中,并在文本框中显示出所加载的路径;
6、点击主界面的单选按钮,选择“再现1”或者“再现2”,点击主界面“再现”按钮,并联机器人按示教数据,逐条再现,直到最后一条;
7、点击主界面“保存设置”按钮,可以把设置的路径保存到配置文件中,下次打开程序加载的就是更改后的示教文件;
8、点击主界面“停止”按钮,可以使串联机器人停止当前的动作;
9、点击主界面“关闭”按钮,关闭并联机器人控制程序;
退出机器人软件,关闭计算机。

