实验项目名称: | 机电联合仿真之赛格威平衡车 | 项目介绍: | 课程性质及背景: 本课程为机械设计及其自动化专业学生学习机械控制的课程,使学生熟悉和掌握机电控制系统设计的统一理论方法,在理论基础上掌握采用机电系统设计的手段和方法,结合实际机构,通过仿真熟悉该机械系统设计的方法和编程能力。 课程特点及必要性: 1、操作过程更直观、清晰;数据范围广泛,结构模式灵活; 2、整合控制原理与虚拟样机技术,打破时间、地域限制。 | 项目目的: | 1、在学习控制原理的通用理论方法的基础上,掌握采用simulink进行系统设计的手段和方法。 2、结合实际赛格威平衡车设计,通过调试,熟悉机电联合仿真的关键技术。 | 面向理论课程: | 控制工程 | 面向专业: | 计算机网络教室,学校校园网 | 仪器硬件设备及软件环境: | 机械设计制造及其自动化 | 实验项目功能及效果: | 实验内容或任务: 以赛格威平衡车为例,说明机电联合仿真的基本原理与方法; 1.建立赛格威平衡车虚拟样机模型。 2.设计simulink控制模型。 3.设置控制接口。 4.建立PID控制器。 5.通过机电一体化仿真调试倒立摆 实验效果: 1、赛格威平衡车虚拟样机模型; 2、设计simulink控制模型; 3、建立PID控制器; 4、机电一体化仿真联调 1、赛格威平衡车虚拟样机模型; 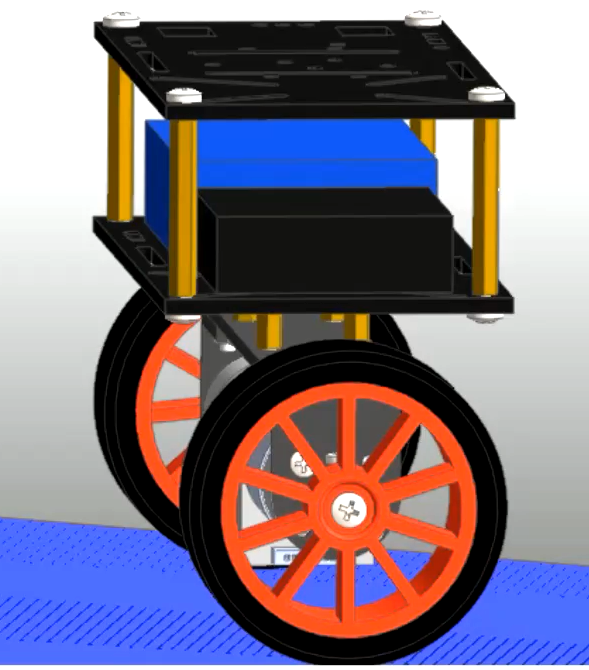
图1 赛格威平衡车虚拟样机模型 2、设计simulink控制模型; 
图2 设计simulink控制模型 3、建立PID控制器; 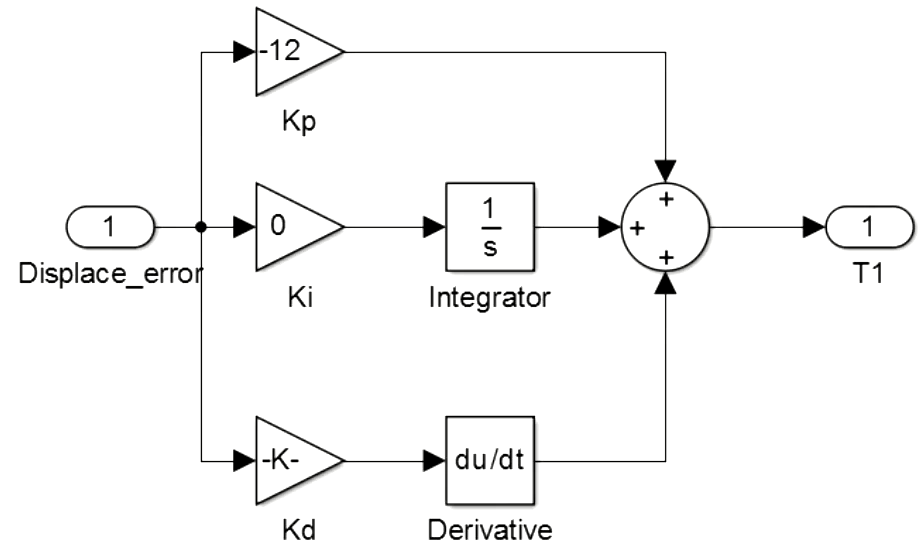
图3建立PID控制器 4、机电一体化仿真联调 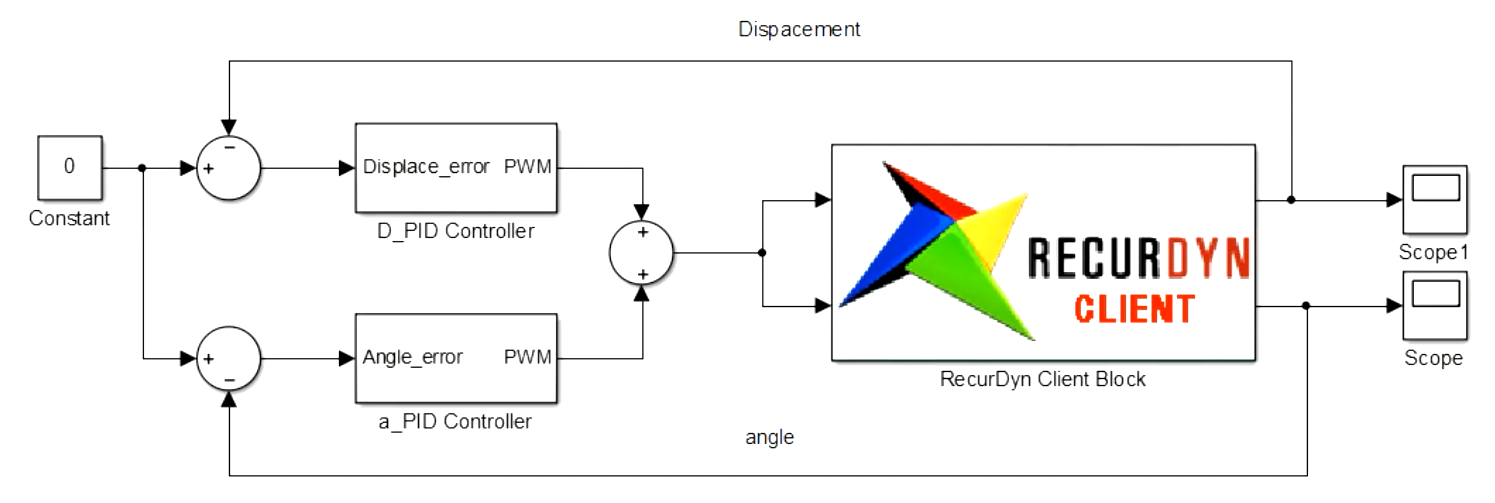
图4 机电一体化仿真调试平衡车
| 附件 | 此处录入PID的核心代码 | 备注 | 要求学生有recurdyn与matlab-simulink建模能力 |
|

