实验项目名称: | 平面连杆机构功能轨迹虚拟仿真实验 | 项目介绍: | 课程性质及背景:本课程为使机械制造及其自动化专业和车辆工程专业学生能深刻理解平面连杆机构能以简单的结构实现复杂的运动规律,而且更以其独特可靠的低副联接形式,只有探寻一种形式新颖、方法独特的教学方法,才能收到良好的教学效果,同时掌握虚拟现实装配的核心功能。 课程特点及必要性:1、可重复性强,零件拆装顺序等操作可模拟真实实验场景;2、整合虚拟现实技术与网络教学平台,打破时间、地域限制。 | 项目目的: | 1、通过实验,知道铰链四杆机构的组成; 2、通过实验,掌握铰链四杆机构曲柄存在的条件; 3、通过实验,熟悉铰链四杆机构三种基本形式的形成条件。 | 面向理论课程: |
AD/CAM技术、机械设计、机械原理、机构设计 | 面向专业: |
机械设计制造及其自动化、车辆工程、热能、建环、化工、食工 | 仪器硬件设备及软件环境: | 平面连杆机构,位置跟踪装置,虚拟现实软件平台 | 实验项目功能及效果: | 实验内容或任务: 1、将已建立的三维实体模型转换成OSG文件; 2、创建虚拟现实场景,调用OSG文件; 3、通用程序中修改拆装规则(比如某螺栓不拆,箱盖拿不下来;轴系不拆,齿轮拆不出来等规则),实现虚拟装拆。 项目功能: 该实验项目主要针对平面四杆机构在工程中的典型应用进行分析,使学生了解四杆机构的分类,每类机构的运动特点,通过改变不同杆件的长度,分析整个机构的运动学参数。 具体功能:首先进入主菜单界面,了解平面连杆机构的主要分类,特别是对四杆机构进行了详细的划分,给出了常规机构及衍生机构,在已给出的机构中选择需要分析的典型机构(牛头刨床、剪刀机机构、缝纫机踏板机构、惯性筛等)。其次,对所选机构进行分析,包括该机构的机构运动简图,该机构的主要运动特点,以及机构运动动画。最后,根据所选杆件的不同参数值,分析各杆件的运动速度、加速度等,观察不同的参数对整个机构的运动轨迹的影响。 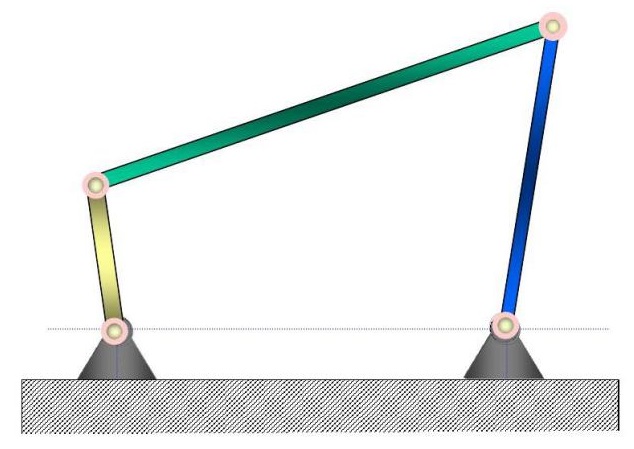
图1 铰链四杆机构 项目效果: 学生可以通过平面连杆功能轨迹虚拟仿真系统,对工程中常见的典型机构进行直观分析,了解平面连杆机构的分类,熟练掌握典型机构的机构运动简图,学会分析平面连杆机构运动学参数对整个机构的影响,知道如何进行变参数设计,使得该机构的运动轨迹满足既定要求,即满足工程需要。 |
|

