1、了解PLC的工作原理;
2、掌握PLC编程与操作方法;
3、掌握步进电机、伺服电机的控制方法。
1、制造物联实验平台一套;
2、安装西门子编程软件STEP7-MicroWIN 的计算机一台。
学生可通过实验验证工业现场中如何使用PLC对控制对象进行控制。
分拣单元包括分拣机械手、分拣输送带、工件输送带三部分,如图1-11-1所示。
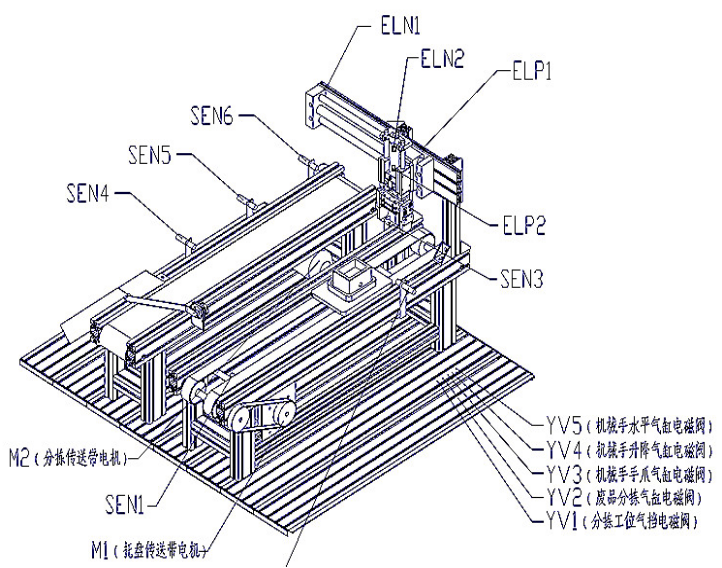
图1-11-1 分拣输送单元结构图
各部件名称和作用介绍如下:
SEN1:传送带工件输入接近开关,用与皮带输入端托盘检测,检测托盘位置;
SEN2:反射光电开关,用与分拣工位处工件检测,检测工件位置;
SEN3:反射光电开关,用来检测传送带托盘输出;
SEN4:反射光电开关,用来检测不良品工件位置;
SEN5:反射光电开关,用来检测分拣皮带启动位置工件是否到位;
SEN6:反射光电开关,用来检测良品工件位置
ELN1:机械手水平气缸负向磁性开关,用来检测机械手在分拣传送带位置;
ELP1:机械手水平气缸正向磁性开关,用来检测机械手在托盘传送带位置;
ELN2:机械手升降气缸负向磁性开关,用来检测机械手升降气缸上升位置;
ELP2:机械手升降气缸正向磁性开关,用来检测机械手升降气缸下降位置;
YV1:分拣工位阻挡气缸电磁阀,通过此电磁阀来控制阻挡气缸的伸出与缩回;
YV2:废品分拣气缸电磁阀,通过此电磁阀来控制分离气缸的旋转;
YV3:机械手手爪气缸电磁阀,通过此电磁阀来控制机械手的夹紧与松开;
YV4: 机械手升降气缸电磁阀,通过此电磁阀来控制机械手的上升与下降;
YV5: 机械手水平移动气缸电磁阀,通过此电磁阀来控制机械手的伸出与缩回;
M1:托盘传送带电机,用来控制输送带的运行与停止;
M2:分拣输送带电机,用来控制分拣输送带的运行与停止;
M2DIR:分拣输送带电机方向,用来控制分拣输送带的运行方向;
本实验中用到的PLC控制部分输入输出点配置表如表1-11-1所示,请仔细阅读此表。
表1-11-1分拣输送单元控制系统PLC部分输入输出点配置表
输入点 | 信号 | 说 明 | 输入状态 |
ON | OFF |
I0.0 | START | 启动按钮 | 有效 | 无效 |
I0.1 | STOP | 停止按钮 | 有效 | 无效 |
I0.2 | RESET | 复位按钮 | 有效 | 无效 |
I0.3 | CEMG | 紧急停止按钮 | 有效 | 无效 |
I0.4 | SEN1 | 托盘传送带工件输入接近开关 | 有效 | 无效 |
I0.5 | SEN2 | 分拣工位反射光电开关 | 有效 | 无效 |
I0.6 | SEN3 | 托盘传送带工件输出反射光电开关 | 有效 | 无效 |
I0.7 | SEN4 | 分拣皮带废品分拣反射光电开关 | 有效 | 无效 |
I1.0 | SEN5 | 分拣皮带启动反射光电开关 | 有效 | 无效 |
I1.1 | 1EL- | 机械手水平气缸负向限位磁性开关 | 有效 | 无效 |
I1.2 | 1EL+ | 机械手水平气缸正向限位磁性开关 | 有效 | 无效 |
I1.3 | 2EL- | 机械手升降气缸负向限位磁性开关(上升) | 有效 | 无效 |
I1.4 | 2EL+ | 机械手升降气缸下降位置磁性开关(下降) | 有效 | 无效 |
I1.5 | M/A | 单/联机选择开关 | 单机 | 联机 |
I1.6 | SEN6 | 分拣皮带良品检测反射光电开关 | 有效 | 无效 |
I1.7 | | 报警清除 | 有效 | 无效 |
输出点 | 信号 | 说 明 | 输出状态 |
ON | OFF |
Q0.4 | START-HL | 启动指示灯 | 有效 | 无效 |
Q0.5 | STOP-HL | 停止指示灯 | 有效 | 无效 |
Q0.6 | RESET-HL | 复位指示灯 | 有效 | 无效 |
Q0.7 | ALM-HL | 报警指示灯 | 有效 | 无效 |
Q1.0 | YV1 | 分拣工位阻挡气缸电磁阀 | 有效 | 无效 |
Q1.1 | YV2 | 废品分拣气缸电磁阀 | 有效 | 无效 |
Q1.2 | YV3 | 机械手手爪气缸电磁阀 | 有效 | 无效 |
Q1.3 | YV4 | 机械手升降气缸电磁阀 | 有效 | 无效 |
Q1.4 | YV5 | 机械手水平气缸电磁阀 | 有效 | 无效 |
Q1.5 | M1 | 托盘传送带电机 | 有效 | 无效 |
Q1.6 | M2 | 分拣皮带电机 | 有效 | 无效 |
Q1.7 | M2DIR | 分拣皮带电机方向 | 有效 | 无效 |
以下是分拣单元触摸屏监控界面,如图1-11-4和图1-11-5所示,联机运行时通过触摸屏对系统运行状态进行监测,单机时通过触摸屏对系统进行手动控制。
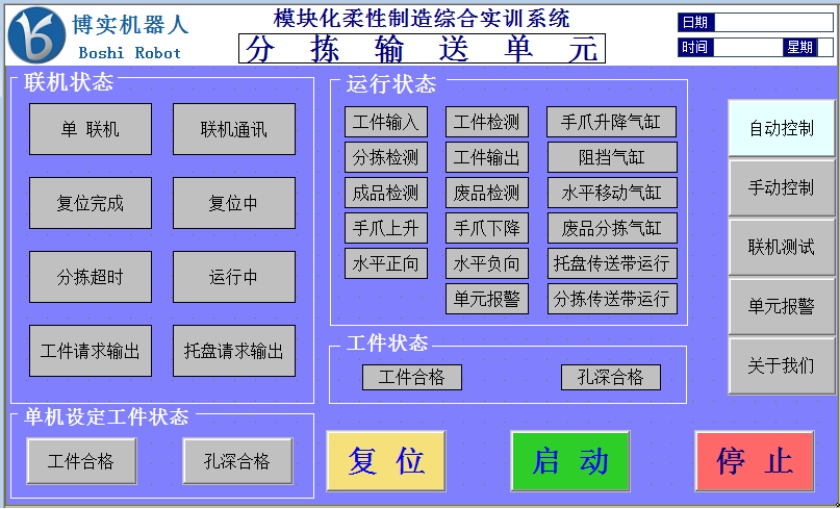
图1-11-4 分拣输送单元自动控制界面

图1-11-5 分拣输送单元手动控制界面
 分拣输送单元分拣实验-接线说明.pdf分拣输送单元分拣实验-实验步骤.pdf
分拣输送单元分拣实验-接线说明.pdf分拣输送单元分拣实验-实验步骤.pdf

