实验内容或任务: 1、读入曲柄滑块机构有限元模型:模型中已经对曲柄滑块机构进行网格划分,材料模型已经定义完成,其中连接曲柄和滑块的连杆材料为柔性材料,可以发生变形,机构中的其他零件均定义为刚体,不会发生变形。 2、确定刚性单元与约束关系:分析机架、曲柄、连杆、滑块之间的运动副形式和运动方向。 3、定义机构载荷形式:该实验中,主动件为滑块,为滑块施加指定的速度作为载荷。 4、设置求解参数 5、运行程序,查看分析结果,包括连杆的应力分布情况,以及在滑块的带动下,曲柄和连杆的位移变化情况。
实验内容或任务: 1、读入曲柄滑块机构有限元模型:模型中已经对曲柄滑块机构进行网格划分,材料模型已经定义完成,其中连接曲柄和滑块的连杆材料为柔性材料,可以发生变形,机构中的其他零件均定义为刚体,不会发生变形。 2、确定刚性单元与约束关系:分析机架、曲柄、连杆、滑块之间的运动副形式和运动方向。 3、定义机构载荷形式:该实验中,主动件为滑块,为滑块施加指定的速度作为载荷。 4、设置求解参数 5、运行程序,查看分析结果,包括连杆的应力分布情况,以及在滑块的带动下,曲柄和连杆的位移变化情况。 实验效果:
1、读入有限元模型(图1) 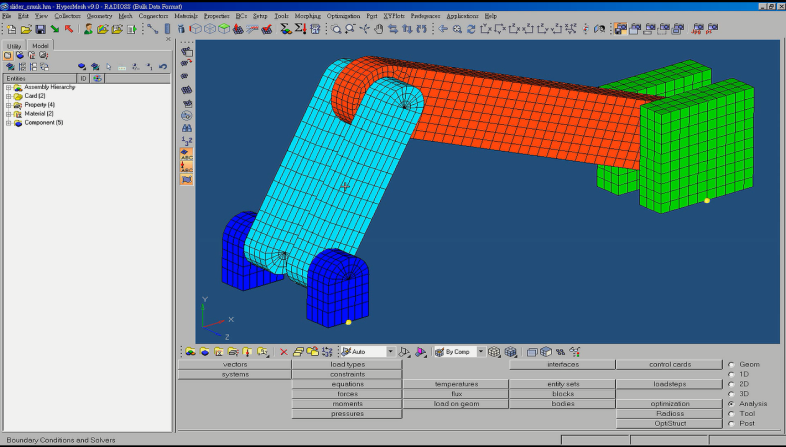
图1 曲柄滑块机构有限元模型 2、确定约束关系及连接关系 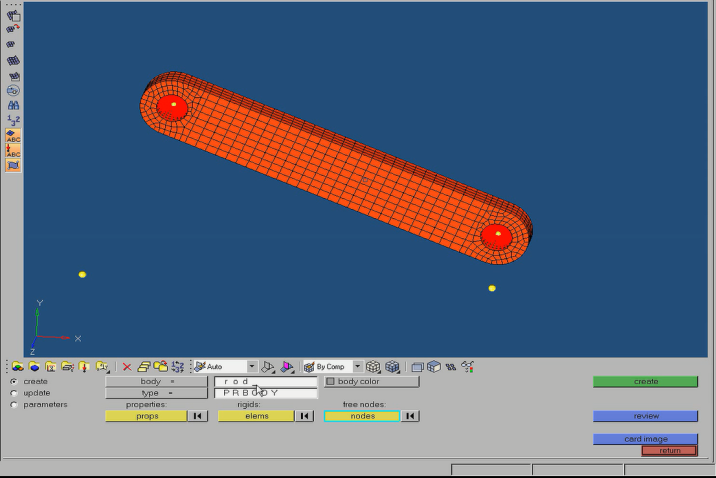
图2 连杆与曲柄、滑块连接部位的中心节点为自由节点,连接该节点与连杆两孔内壁节点的一维单元为刚性连接 
图3 设置移动副类型,曲柄与机架之间的连接设置为旋转副(revolute joint),曲柄与连杆之间的连接为旋转副,连杆与滑块之间的连接为旋转副(translational joint),滑块与机架之间的连接为移动副。 3、定义载荷类型 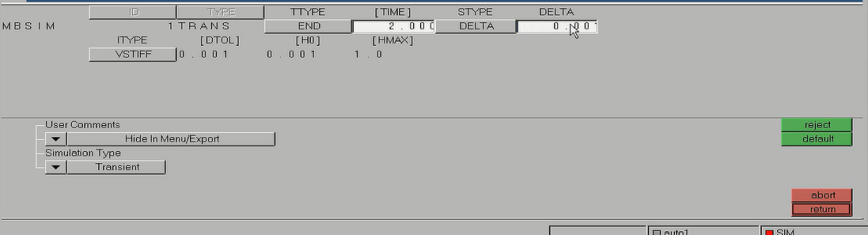
图4 设置多体动力学分析参数 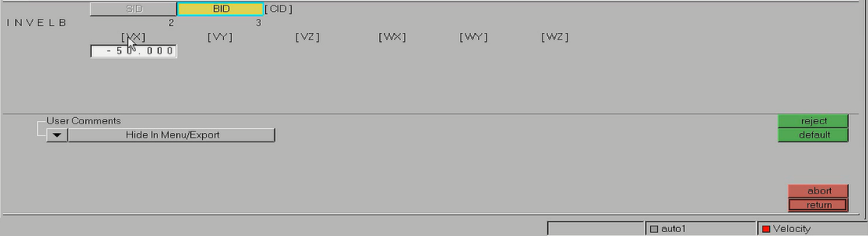
图5定义滑块的运动速度 4、设置求解参数 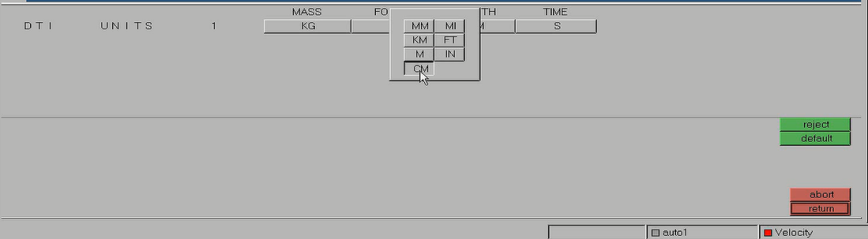
图6 定义求解单位 5、运行程序并查看结果 
图7 程序运行过程 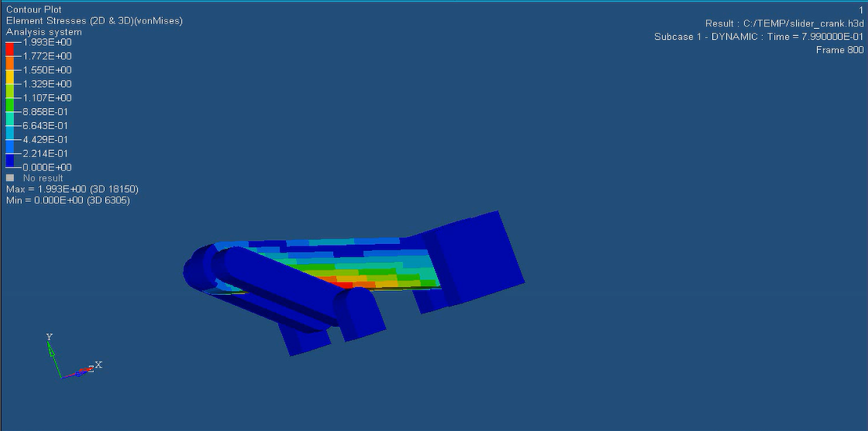
图8柔性连杆在某一时刻的应力分布结果 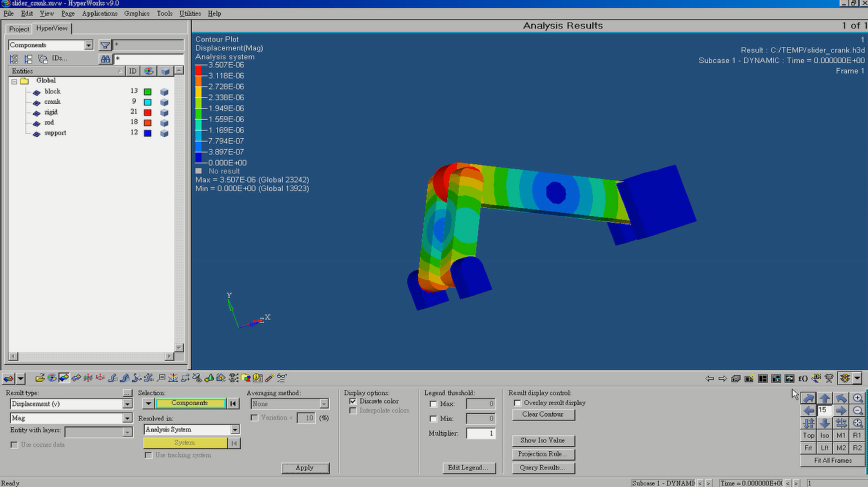
图9 某一时刻曲柄和连杆的位移分布情况 | 
